
Drone Simulation
Docker | Last Updated
December 15, 2023
Drone Simulation
This project contains a mock simulation of a drone-based package delivery system located on the University of
Minnesota campus. With this project, we aim to create an example framework for real world implementation of a
drone based delivery system. This project provides a number of pathing algorithms for the traversal of the
drone
network, as well as an interface through which to schedule deliveries. Specifically, the front-end of the
project explicitly demonstrates how the drones could move throughout the environment. Deliveries can be
scheduled through the scheduler link available on the landing page, and drones in the simulation will traverse
the environment to pick up and deliver packages once deliveries are scheduled. Additionally, the scheduling
page
allows the user to choose a specific pathing algorithm for the drone (DFS, BFS, Dijkstra, A*) as well as give
identifiers/names for deliveries.
#C++ #Docker #Decorator #Strategy #Factory #Singleton #Observer
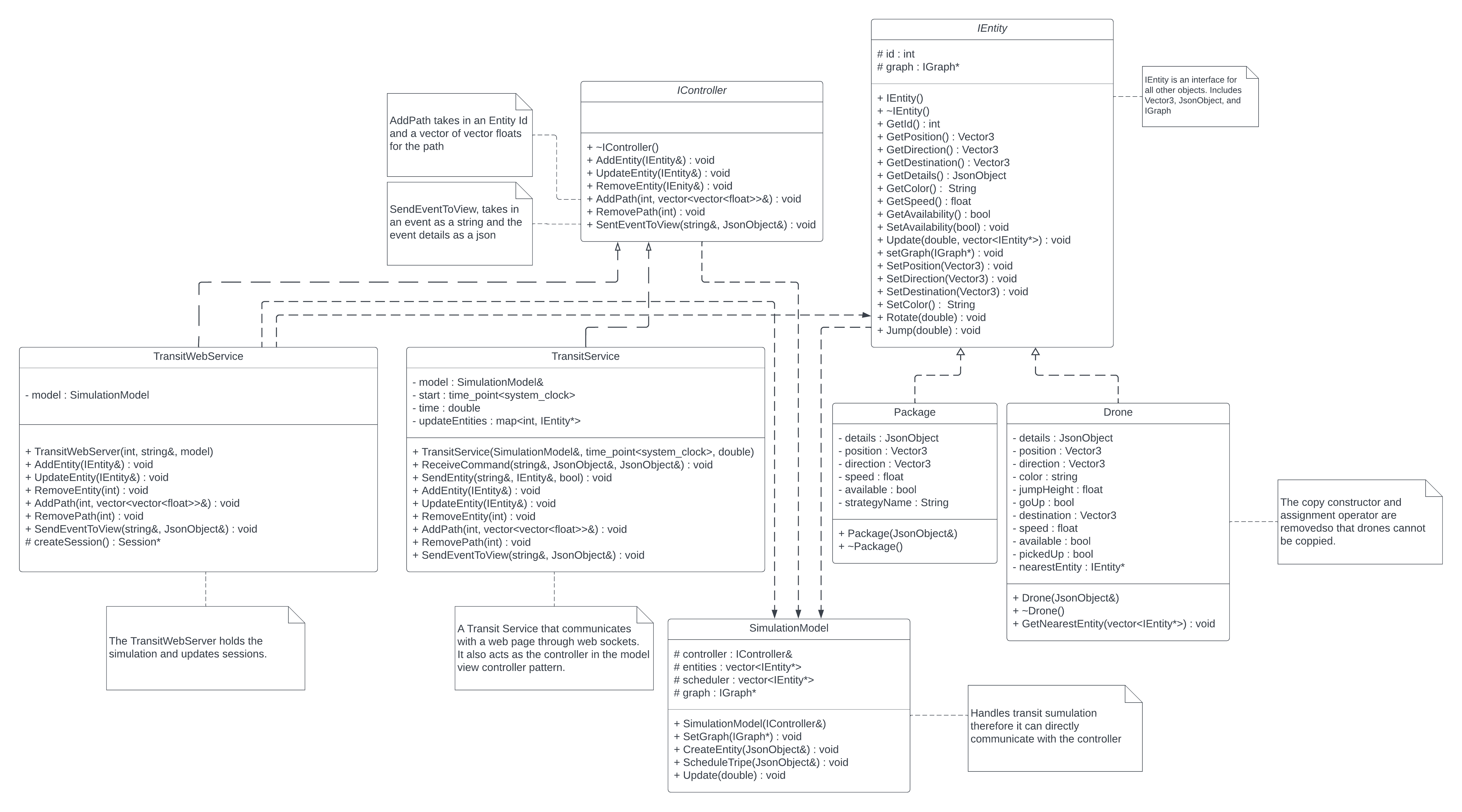
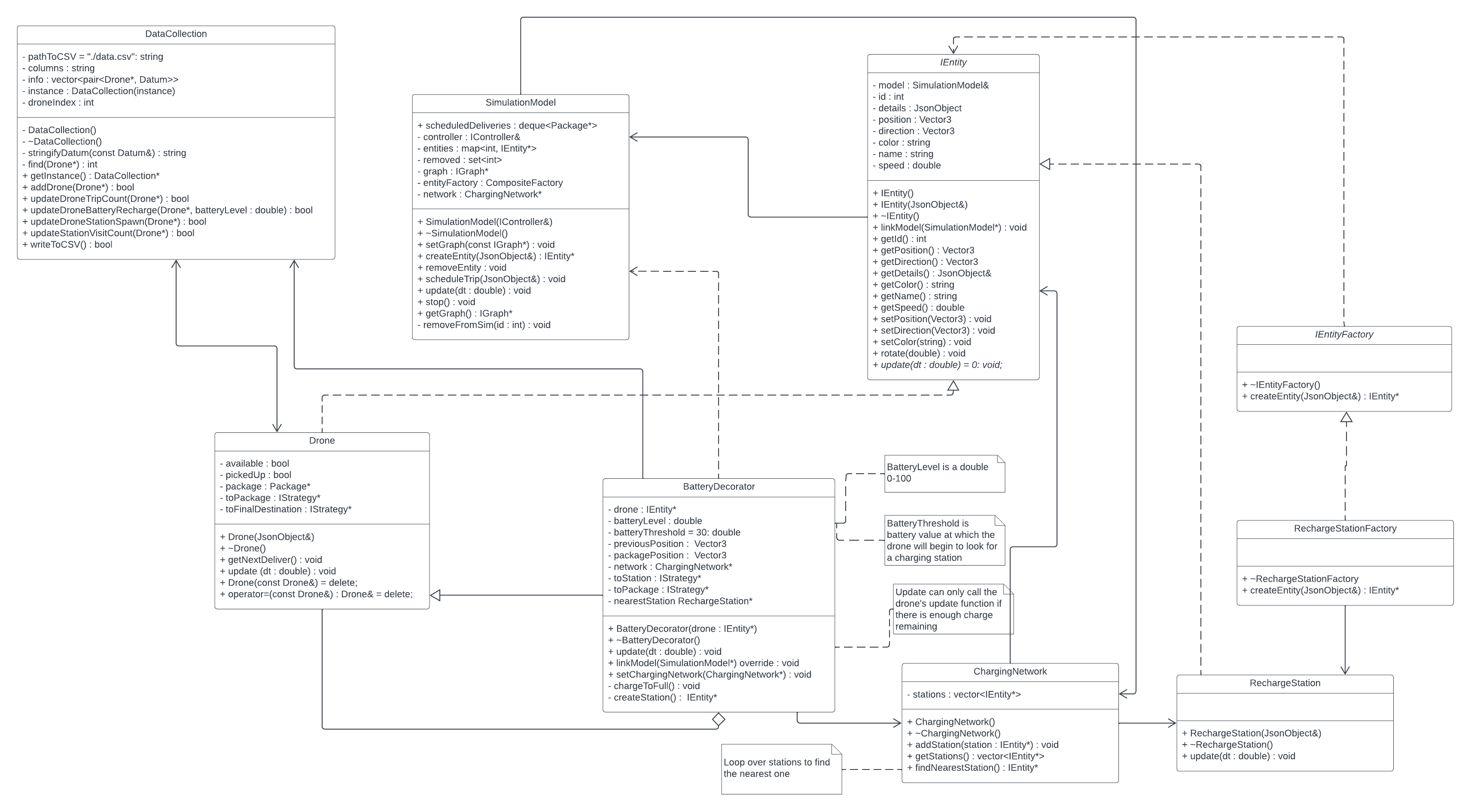
UML Diagrams